Updates – September 2014 (Wassersuche):
Inzwischen habe ich weitere Naturwanderungen mit RV-Experimenten verbunden. Da ich eine Vorliebe für idyllische Wasserstellen habe, und auch ein wenig an Rutengänger („dowsing“) denken musste, zielten die aktuellen Targets auf „Die schönsten, ungestörtesten Wasserstellen“ ab. Sprich, sie sollten nicht gleich an großen Wanderwegen oder Freiflächen liegen, sondern einen gewissen Refugiumscharakter haben.
Das Mapping fand wieder auf einer Open Source-Karte statt, die bezüglich Naturgewässern in einigen Gegenden noch ziemlich unvollständig ist, und meist nur größere Bäche oder Teiche enthält. Um es gleich vorweg zu nehmen: Von acht Targets passten sieben (sichtbare) Gewässer im Umkreis von maximal 50 Metern. Diese lagen stets querfeldein, und relativ weit von Wegen entfernt (bis zu ~400m). Wenn doch Wege in der Nähe waren, gab es einen gewissen Sichtschutz durch dichtes Unterholz.
Was war nun genau vorzufinden? Teilweise entsprachen die Stellen meinen Vorstellungen so stark, das ich echt staunen musste. Der Rest war kleiner, aber in seiner Beschaffenheit ähnlich: Man stelle sich einfach vor, man hat die Vision eines schönen Sees vor Augen, findet dann aber nur einen kleinen Tümpel, der jedoch (abgesehen von der Größe) erstaunlich ähnlich aussieht, wie das, was man sich beim Tasking vorstellte.
Darin bestätigte sich etwas, das man im Remote Viewing schon von anderen Mapping-Anwendungen kennt: Die „Matrix“ führt einen meistens zu dem nächst-ähnlichen Punkt, wenn es dort nichts gibt, was genau den gesuchten Kriterien entspricht (statt z.B. einfach garnichts auszuwerfen, was nur sehr selten vorzukommen scheint). Dies ist eine wichtige Erkenntnis, die nicht nur räumlich, sondern auch zeitlich zu gelten scheint, und unbedingt bei Zukunftsschauen beachtet werden sollte.
Wenn man z.B. auf einer Timeline nach der „nächsten globalen Katastrophe“ sucht, wird man auch so etwas in der Art finden, selbst wenn sie in dem geviewten Zeitraum nicht eintritt. Dann lokalisiert und beschreibt man stattdessen ein lokales Ereignis, projiziert dieses jedoch auf globale Ebene. Oder man viewt gar eine selbstgeschaffene Wahrscheinlichkeit, die jedoch nur als metaphysisches Equivalent existiert, aber nicht als physisch eintretendes Ereignis (Gedanken formen auf gewissen Ebenen die Realität unmittelbar). Somit hat man sich sein Target durch unpräzises oder suggestives Tasking „kontaminiert“.
Darin sehe ich zumindest eine Erklärung, warum z.B. die zahlreichen „Killshot“-Vorhersagen eines Ed „Dr. Doom“ Dames wiederholt nicht eintreffen, oder zumindest nicht in globaler Form. Allerdings müsste ich das exakte Tasking sehen, um es genauer beurteilen zu können, aber leider habe ich dazu noch nie Rohmaterial gefunden. Bei Sessions auf die Zukunft sollte man daher immer die „Ort zu einer Zeit“-Methodik nehmen, also ganz neutral einen Ort zu einer bestimmten Zeit beschreiben (z.B. „Das Tine-Denkmal in Husum am 01.01.2030“). Aber das nur als Randnotiz zum eigentlichen Thema dieses Artikels…
Kommen wir nun zu einigen Beispielen von meinen wässrigen Mapping-Funden in der Natur:

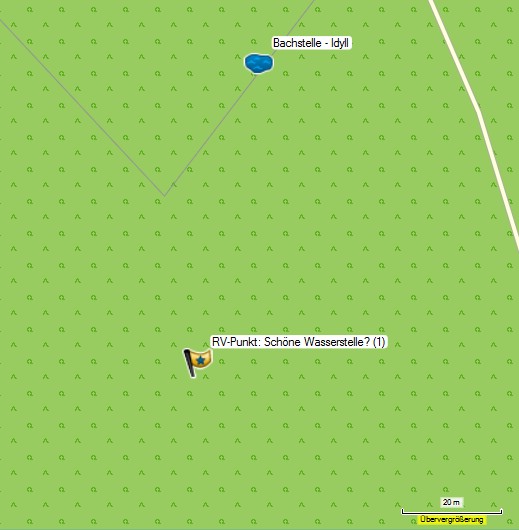






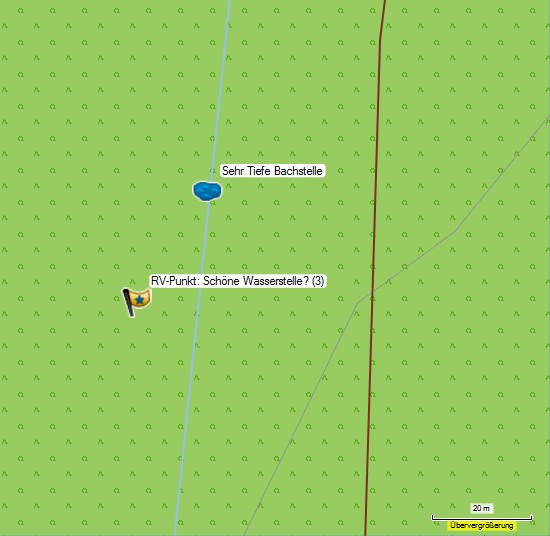
Fazit aus diesen Treffern in der tiefen Natur: Das RV-Mapping ist ein sehr nützliches Tool, was bei entsprechender Routine auch mal spontan eingesetzt werden kann. Aber man sollte die Eigenarten und Tücken (automatische Lokalisierung des nächstahnlichsten Zieles, manchmal mangelnde Präzision etc…) ebenfalls kennenlernen und berücksichtigen. Sauberes Tasking ist auch hier, wie bei allen RV-Anwendungen, äußerst wichtig.
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.